The class was highly encouraged to utilized Arduinos for the project in order to make it easier to control all of the robots from one motherboard. In response, the NXT robot design was aborted, and the group researched how Arduinos work and function. One Arduino Uno has the ability to run eight servos at a time, such as eight motors. The group decided to construct a platform out of sturdy wood for the melodica to be placed on, as seen in Figure 1. Servo motors will be staggered along the platform on a tiered K’nex piece structure. The melodica will remain stationary, but the platform was designed so that it could also serve as a track for the melodica to move along if possible. The perk of having the melodica move would be that the robot could play more than eight musical notes, since the motors would then be enable to push down on more than one note. The servos will have rods attached to them, and will placed as close to the melodica keys as possible, allowing a greater torque, and thus more force.
The air tank arrived in the mail also arrive this week (Figure 2.). It will have to be filled, and tested before the actual performance. It is important that the mouthpiece of the melodica and the air spigot are held tightly in place in order to produce the best sound. At the moment, the spigot and the mouthpiece do not fit properly together, thus some sort of membrane must be used to hold them together.
Since the music parts have not been assigned yet, the group has focused on learning how to program the servos properly so that the drum sticks hit the keys reliably and at a force that sounds musically pleasing (Figure 3. In the upcoming week, the group needs to program the servos to play the assigned music part.
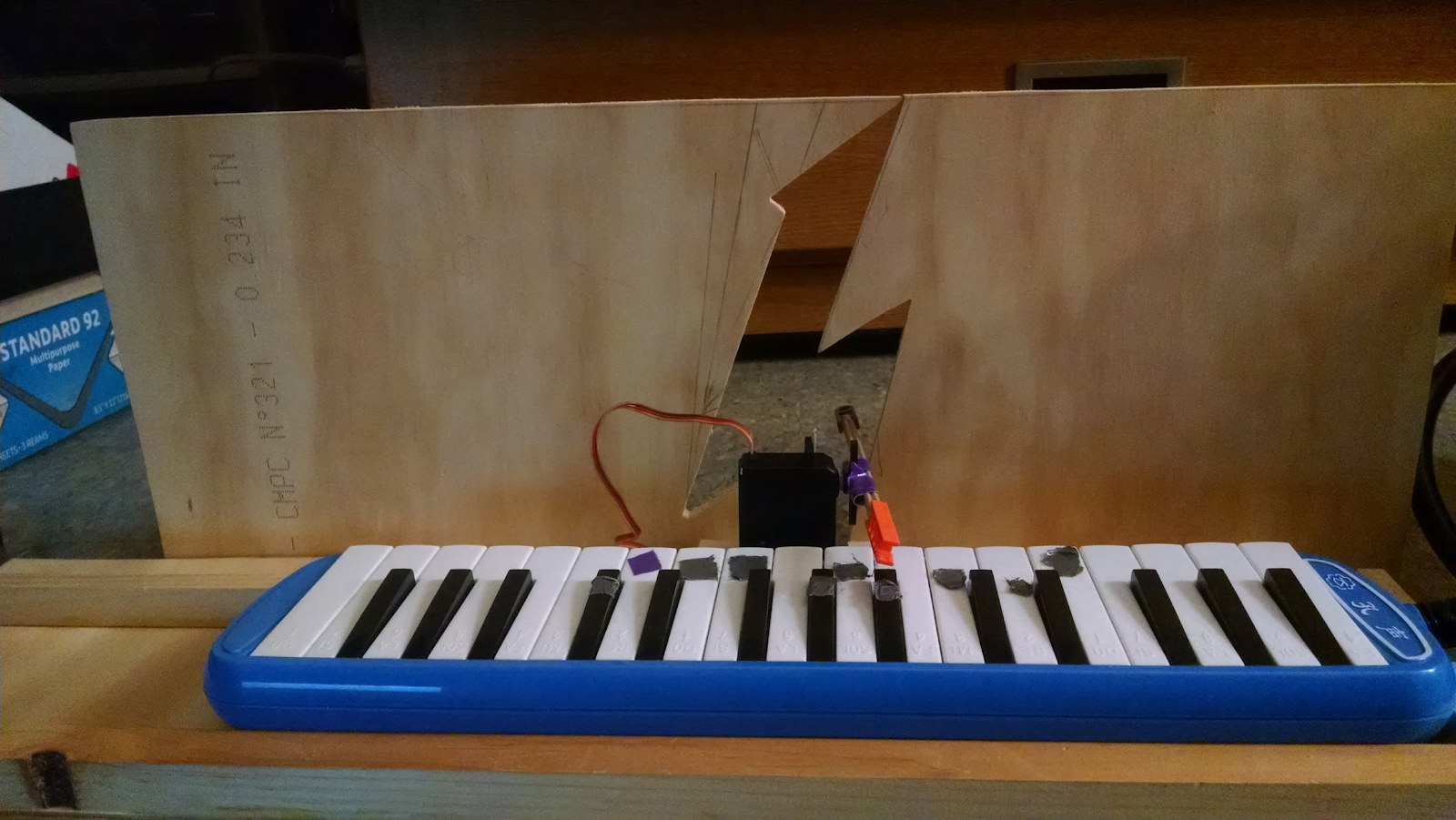
Figure 1. Melodic sitting on the constructed wooden platform.
 |
| Figure 2. Purchased Air Tank. |
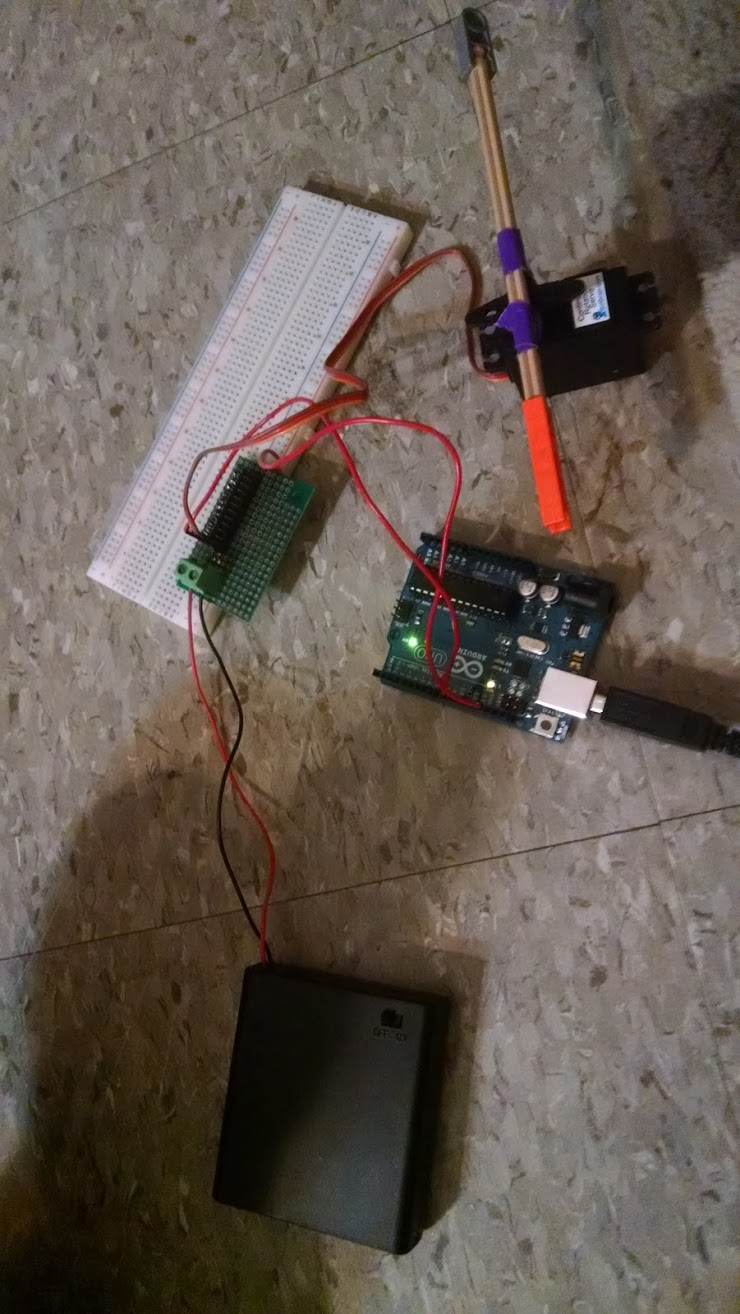 |
| Figure 3. Working on programming Arduino Servos. |
No comments:
Post a Comment