For this week
group 6 continued to work on the project to prepare for their performance that
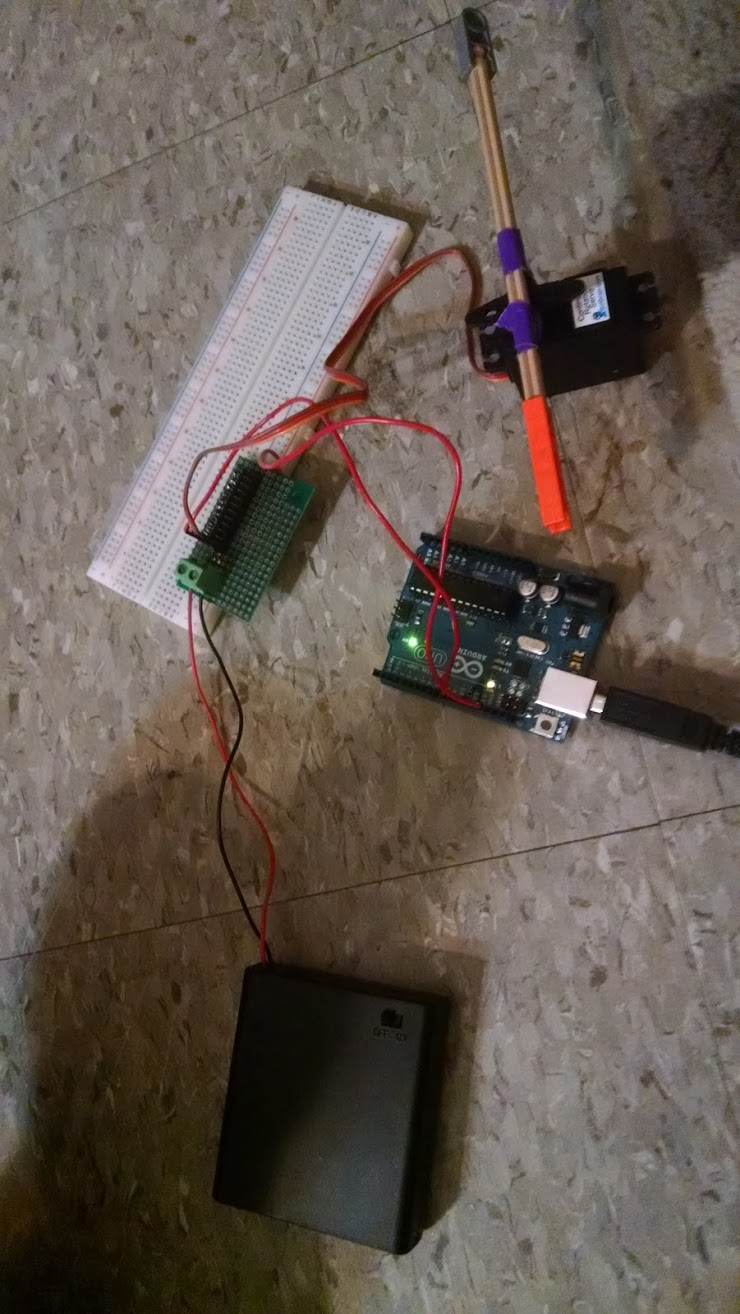
was two days later. The team had completed everything. This included
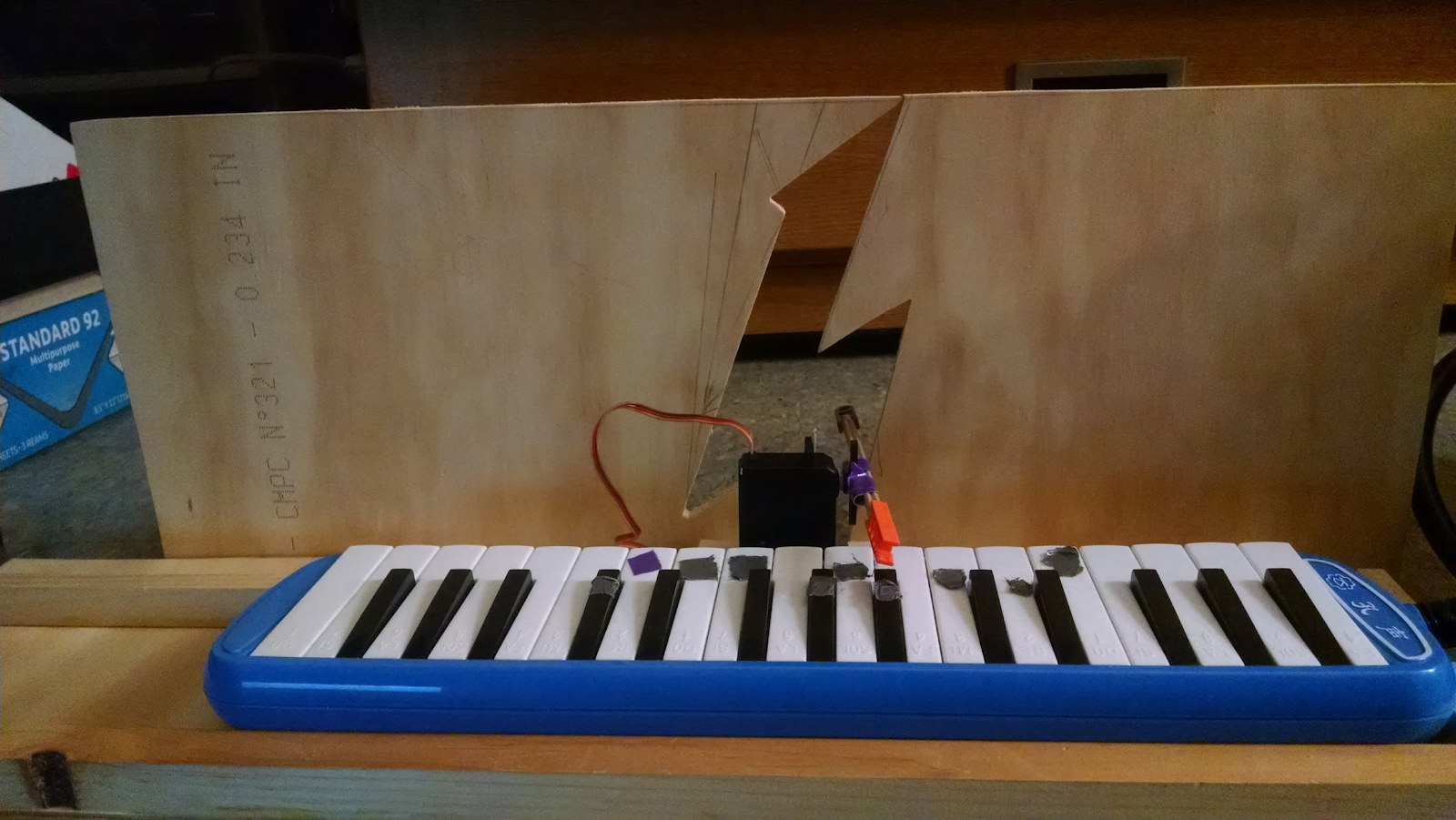
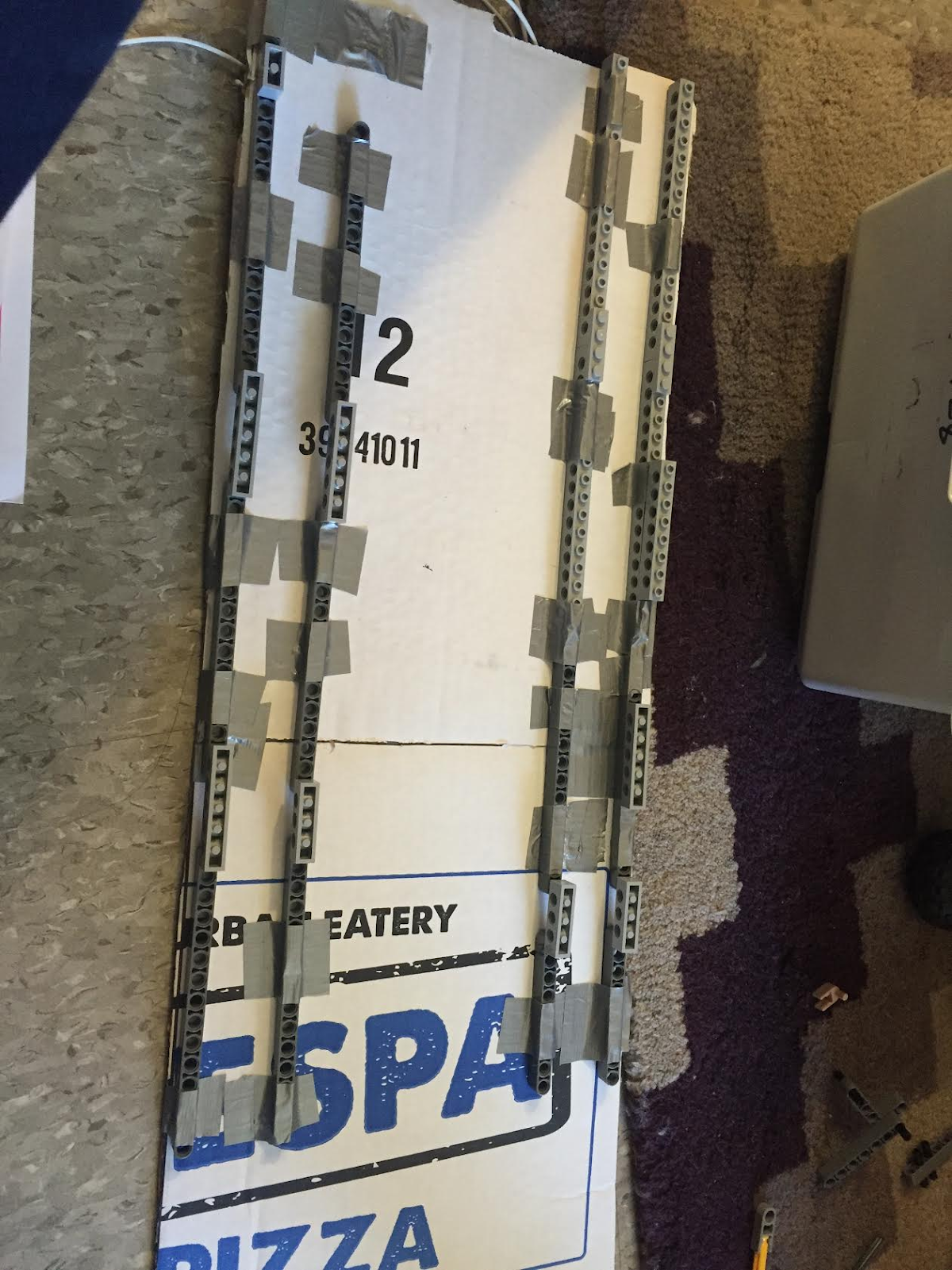
the coding of the arduinos and the mechanical set-up of the arduinos onto the
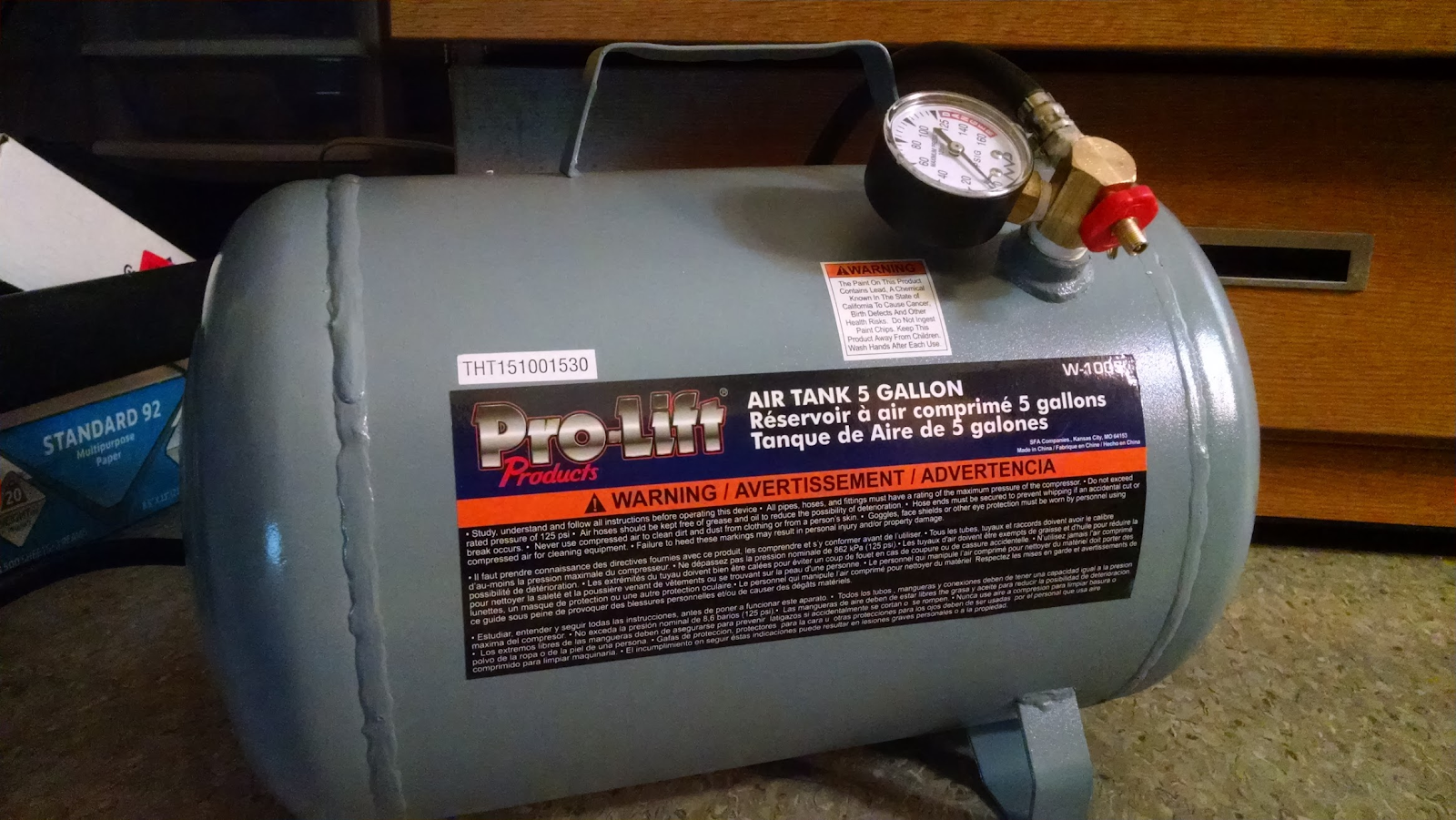
melodica as well as the connection of the air tank to the melodica and how to
control the air pressure of it going into the melodica. Group 6 also figured
out how to refill the air tank with air. The group once again purchased the
necessary parts to make this happen. Two days later was the performance. On
this day, group 6 gathered their materials to the black box theatre. Afterwards
they had everything set-up. When the group was trying to refill the tank, they
realized they purchased a wrong part so it did not connect to the compressor. A
team member from group 6 had then rushed over to the nearest hardware store to
find to perfect part. When this teammate came back the air tank was filled up
with air again and that issue was resolved. Shortly after, group 6 noticed they
needed someone to open the valve of the air tank. This was due to the fact that
the air in the tank only lasts for about two minutes and group 6 does not play
their part until near the end of the song. Thus, they had one of their members
hide under a table with the air tank so it will be turned on when needed. With
this issue resolved, the performance went very well.